Get a quote in only 3 steps!
1. Add the items you are interested in to your cart
2.Go to your cart
3.Click on GENERATE A QUOTE
Your quotations are available online on your customer account.
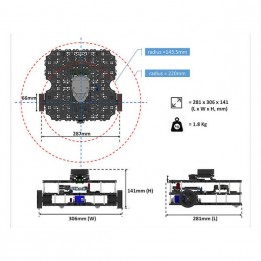
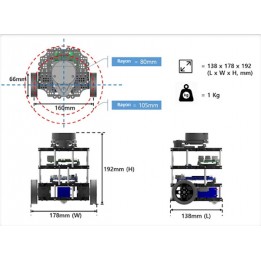
Allow us to introduce you to the LoCoBot robotics kit, an indoor mobile platform designed for working on AI applications in the field of autonomous navigation and manipulation.
LoCoBot is an open-source mobile robot powered by the Intel NUC NUC8i3BEH Core i3 processor with 8 GB of RAM and 240 GB of SSD. It’s equipped with an Intel® RealSense™ D435 depth camera and offers the option of adding a robot arm as well as an RPLiDAR A2M8 lidar, allowing enhanced mapping and digitisation for more advanced projects.
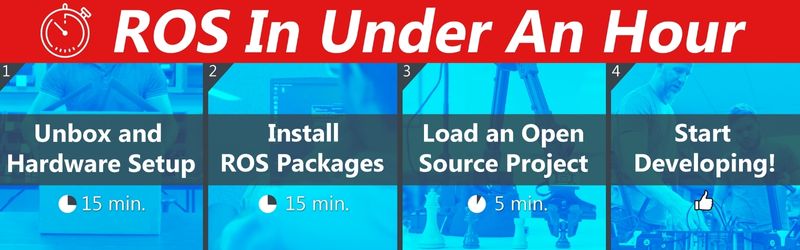
InterbotiX products are designed to get users started and developing on ROS as quickly as possible, which is why the brand has designed its platforms to be up and running in under an hour. The robot comes pre-assembled with a minimal hardware set-up.
There are 3 different robot arms you can add to your LoCoBot platform, all built around the Dynamixel servos (X series) by Robotis. You can choose between 4 versions:

Sold pre-assembled (arm and pan-tilt assembled / camera to be mounted)
Intel NUC NUC8i3BEH mini PC:
Sensors:
Lidar (optional):
PX100, WX 200 or WX250 mobile arm:
Dynamixel manuals
Consult our FAQ or contact us at help@generationrobots.com if you have any problems with your robot.

Allow us to introduce you to the LoCoBot robotics kit, an indoor mobile platform designed for working on AI applications in the field of autonomous navigation and manipulation.